Deep Learning-based Autonomous UAV Landing with Marker Detection
As a Lead Scientist I work for our Innovation Lab. One of the projects I have been working on is the development of an algotithm to allow the autonomous landing of a drone using a monocular camera as the main sensor . I successfully completed this 5 months project and tested the results on a drone simulator built on Unreal Engine (UE). We are currently trying to implement the algorithm I developped in a small drone equipped with a Rasberry pi 3. There are other computational and hardware challenges that I will explain along the way.
Objectif of the Project
Autonomous landing of an Unmanned Aerial Vehicle (UAV) is a difficult problem. Although the GPS signal is essential to assist the drone in landing, its error in meters remains significant. In addition, the received signal is often very weak when the drone is in environments with poor GPS connection (urban area, mountains, etc.). We want to remedy this problem by using the standard means available, ie, a monocular vision camera, coupled with the latest advances in Deep Learning for object detection and localization. The object in question in our case is a ground marker. An algorithm based on convolutional neural networks will be proposed in order to help the drone fly autonomously towards the target and land there safely with better precision.
Context
The autonommous precision landing is part of the AI autopilot project which aims to equip drones with the latest advances in artificial intelligence in order to make the drone autonomous and more stable in the face of environmental variations. The project consists of three main axes:
- Design of a robust autopilot using reinforcement learning approaches.
- Develop an AI algorithm to improve the performance of the estimator
- Develop an algorithm allowing the drone to perform an autonomous landing with the help of a ground marker.
Challenges
For the practical implementation development of the precision landing part, we note the following scientific and technical obstacles:
- The reflection of the sun or the shadow on the tag can make detection difficult
- Difficulty detecting the tag if the image from the camera is distorted.
- The lower the resolution of the camera, the more difficult it is to recognize the tag, especially at high altitude
- The techniques found in the literature are generally based on the detection of the geometric characteristics of the tag, and this is where the detection problems that have just been mentioned mainly come from. The proposed solution that relies on object detection algorithm, based mainly on convolutional neural network will overcome most these challenges
Introduction
My main interest was in the development of the last, but not least point. In order to carry out the necessary experiments, it was important to choose a drone simulator where the dynamics of the UAV (quadcopter in my case) is well defined. I went through a literature survey to identify numerous autonomous vehicle simulators with the idea to find the one that is most suitable for our type of application. In the survey, a simulator designed by Microsoft, named AirSim (Aerial Informatics and robotics Simulation) was selected.
AirSim is a simulator for drones, cars and more, built on Unreal Engine (we now also have an experimental Unity release). It is open-source, cross platform, and supports hardware-in-loop with popular flight controllers such as PX4 for physically and visually realistic simulations. It is developed as an Unreal plugin that can simply be dropped into any Unreal environment. Similarly, we have an experimental release for a Unity plugin.
The drone will thus have the ability to interact with a virtual environment that is closest to reality. This will allow a smoother transition when the time comes to try the algorithms developed on a real drone.
Main tasks
An algorithm for tracking the landmark (ground marker) in real time, as well as the calculation of its coordinates using only a single monocular vision camera is proposed. Tiny-YOLO is a variation of the “You Only Look Once” (YOLO) object detector proposed by Redmon et al. in their 2016 paper, You Only Look Once: Unified, Real-Time Object Detection. It has been chosen for the object detection part for its small architecture, which allows it to run faster.
Learning the network requires time and significant computing power. The training is performed on an Ubuntu 16.04 machine equipped with a GTX 1080 graphics card. The Cuda and cudNN libraries are installed to allow parallel calculation and thus, increase performance and have faster training. ComputerVision mode makes it easier to control the drone, a small Python script is used to acquire the set of images necessary for training the network. To assess the performance of the proposed approach, a quadcopter drone equipped with a camera is simulated with AirSim on the “Landscape Mountain” environment. The results obtained in simulation make it possible to confirm that the drone can detect the marker in real time and, based on the algorithm that will be described later, to calculate the coordinates of the landmark, and therefore guide the drone up to a distance of less than a meter in height and with an error of 10 cm from the center of the tag (landmark). The drone, when reaching this position, triggers a secure automatic landing using a feature that is available in the flight controller (autopilot).
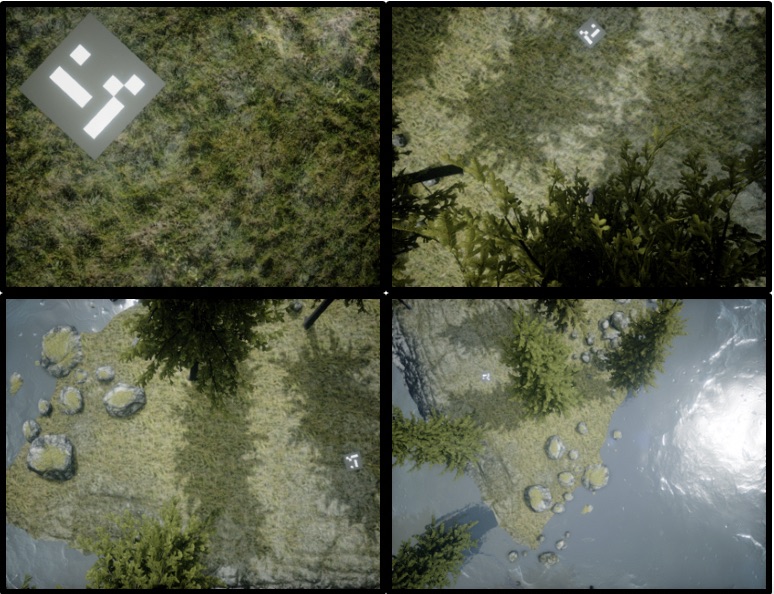
AirSim is used for image acquisition. The Figure shows 4 images taken from a drone’s down facing camera at different altitudes
Training of Tiny Yolo
Yolo (You Only Look Once) is a fast object detection algorithm developed by Redmon et al. Tiny Yolo is just a compact version of it. Object detection is a task in computer vision which consists of identifying the presence, location and type of one or more objects in a given image. In our case, we are talking about a single object and a single class which represents our ground marker. YOLO makes it possible to predict the coordinates of the detected objects as well as the probability of their associated classes. On a computer equipped with an NVIDIA GTX1080 GPU, it is possible for a YOLOv3, to run at more than 30 fps. YOLO processes the detection of the type of object, and its location inside the image simultaneously. Thanks to its good generalizable representations, it is possible to do transfer learning, that is to say, use weights that are pre-trained and build a new network by changing only the last connected layer.
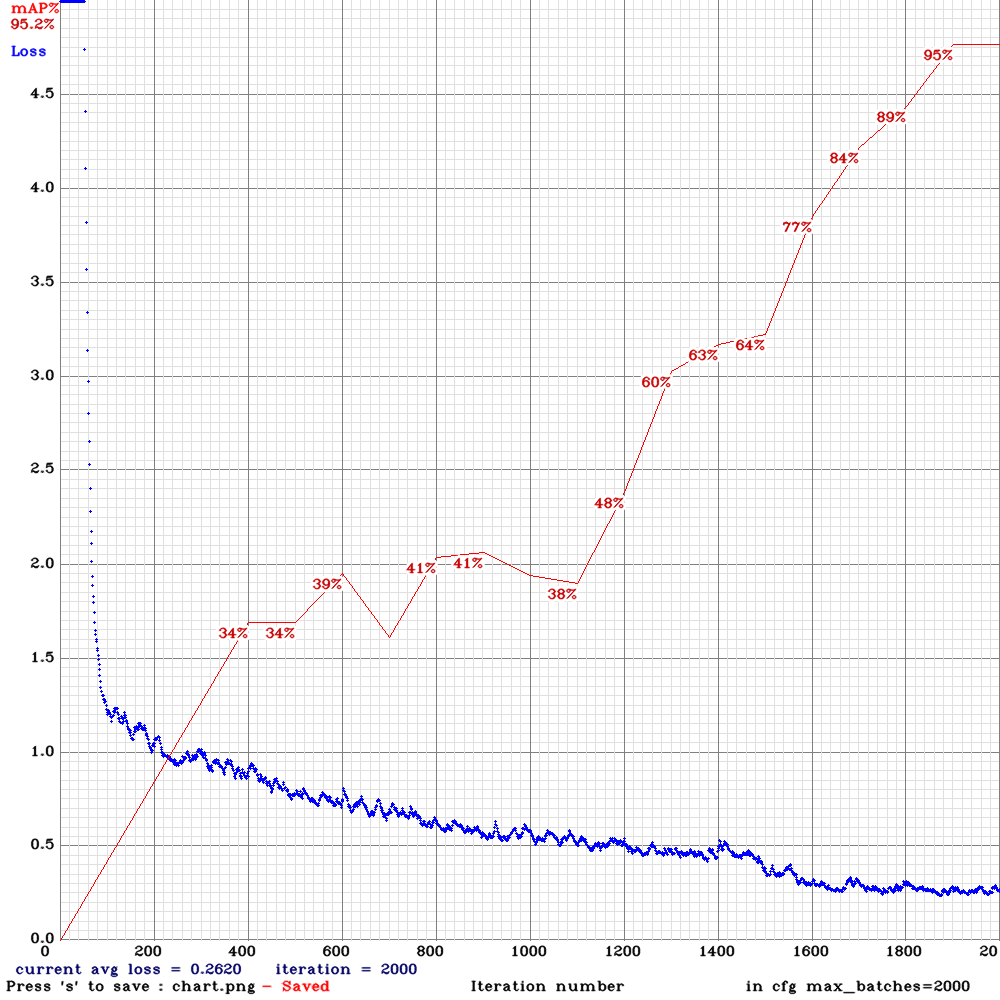
Training Tiny Yolo: Evolution of the mean average precision (mAP) together with the average loss during the training, for 2000 iteration
Running the full YOLOv3 model on a Rasberry Pi is a challenging task, provided tha a substantial processing power is needed. Tiny YOLO makes it possible to embark YOLOv3, with a small decrease in precision, however, with a considerable gain in computing time. The structure of Tiny Yolo network in version 3 is presented in the Table below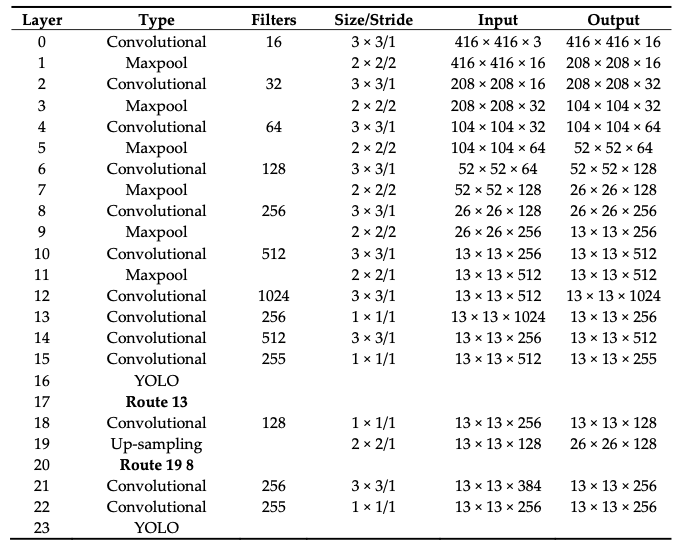
You Only Look Once Tiny (YOLO tiny) Architecture
Landing System
The diagram below illustrates the operating procedure for the autonomous landing system. The Tiny YOLO localisation algorithm processes the video stream from the on-board camera image by image, so for each image processed, the network generates a set of coordinates composed of the detected object class c, the tag center (x, y), with its dimension given in width and height (w, h), as well as the probability s of belonging to a class. the full vector is given as follows: [c, x, y, w, h, s]. These coordinates are then converted to offset angles with respect to the center of the ground marker. These angles are sent to the autopilot so that the drone moves in a way the marker is always in the center of the image. It is assumed that the angles of the quadcopter (yaw, pitch, roll) can be neglected when the offset angles are calculated.
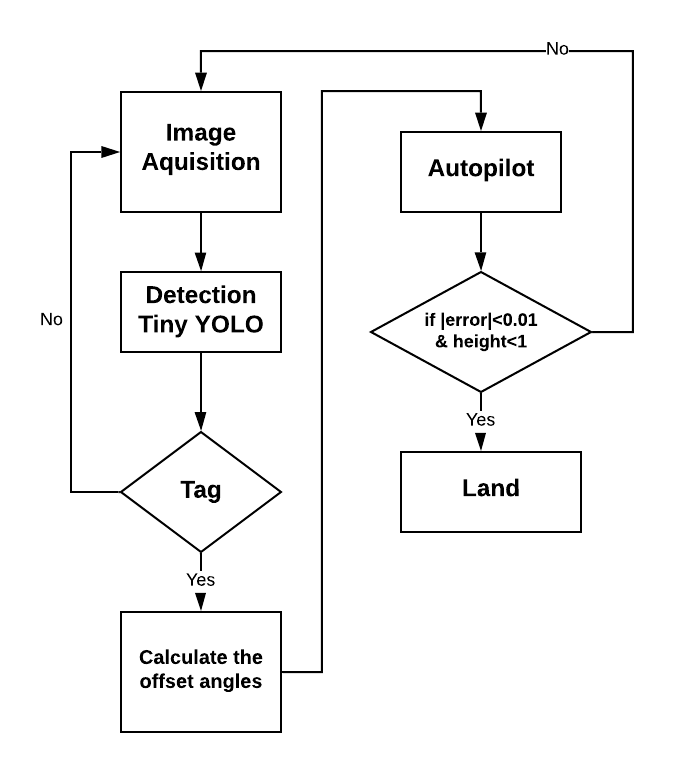
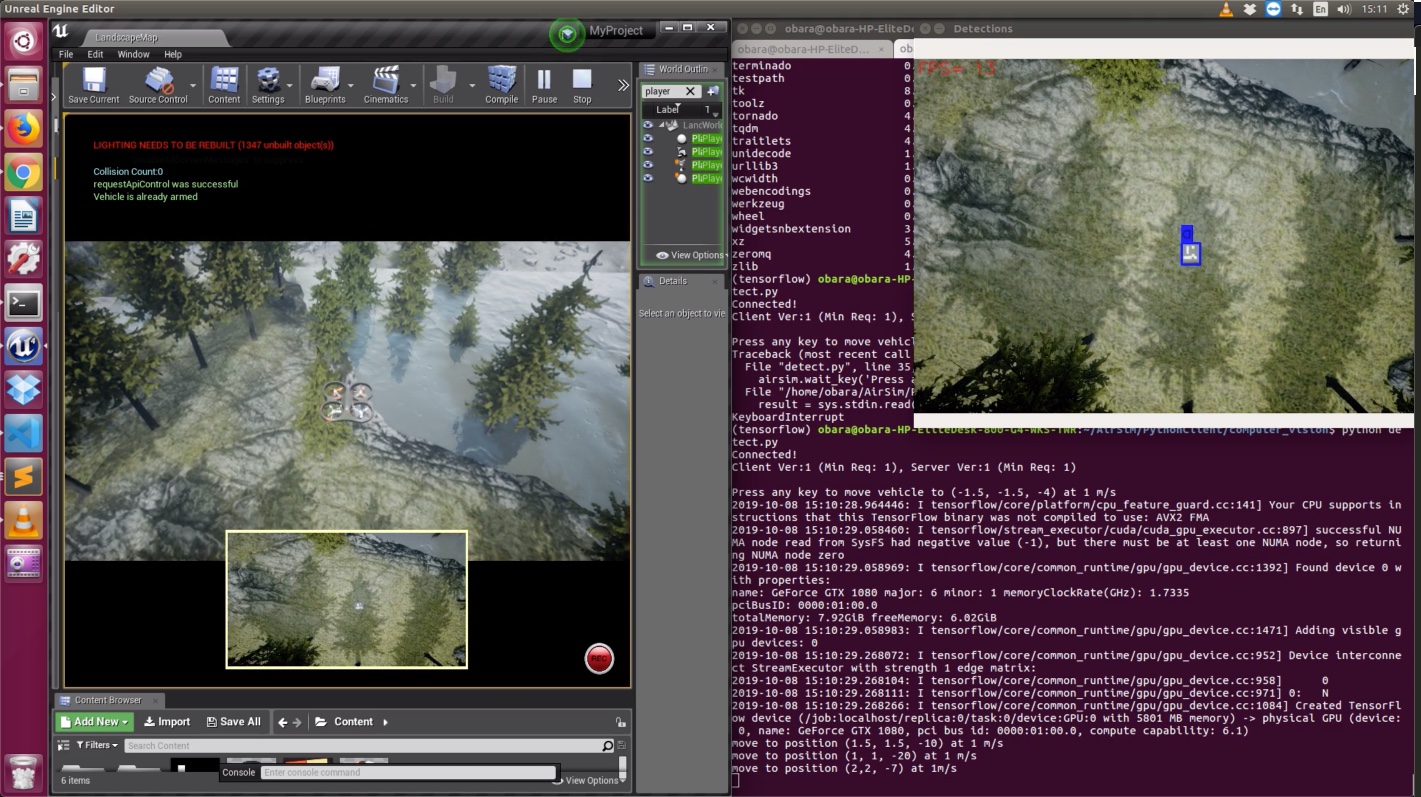
Autonomous landing procedure Autonomous landing simulation with Unreal Engine Editor
On the screenshot above, one can observe the Unreal Editor (UE) on the left-hand side running the simulation inside the Landscape Mountain environnement, and showing the drone flying over the marker. On the right-hand side, an extra window is generated to clearly observe the bounding blue box around the detected marker. The Linux terminal is used to launch the UE and of course to run the python code for the autonomous landing procedure.
Technologies and Frameworks
A good part of the project involved training Tiny YOLO with respect to the ground marker. For this reason a set of 400 images including the ground marker were acquired from the simulator. I did not explain how I did the annotation of the the images used to train the deep neural network Tiny Yolo, however, many open source tools are available. The main tools and framework used during the development are as follows
Pythonas the main programming langageKeraswithTensorflowas a backendOpenCVAirSim API's